


The idea of a fourth, white traffic light to help manage roads with a mixture of CAVs and manually driven vehicles hit the headlines earlier this year. But what is the traffic management thinking behind this concept? And can anything be learned from the idea, even if it never reaches full adoption? We speak to the academics behind the concept to get the full story.
Universities are in the business of releasing white papers, however relatively few receive the level of public interest generated by one recent example from the Department of Civil, Construction, and Environmental Engineering (CCEE) at NC State University, which eventually saw CCEE associate professor, Dr Ali Hajbabaie, interviewed on US TV channel CBS 17 about his research into adding a fourth light on traffic signals to help traffic flow with connected and autonomous vehicles (CAVs).
Titled White Phase Intersection Control Through Distributed Coordination: A Mobile Controller Paradigm in a Mixed Traffic Stream, the paper was first published in IEEE Transactions on Intelligent Transportation Systems. It proposes adding a ‘white phase’ to current signals, with a new white light telling human drivers to simply follow the car in front of them, while red would continue to mean stop, green would still mean go, and amber would still urge caution and signal ‘prepare to stop’. Red light enforcement measures would continue, as a red light would still require a vehicle to stop and not proceed through the intersection.

The scientists behind it have conducted hours of simulations that show the new approach could significantly improve travel A fourth, white traffic light could be the hottest new concept in traffic management right now. Even if the idea never reaches full adoption, it nevertheless brings new focus to the challenge of integrating the flow of CAVs with manually driven vehicles on our roads time through intersections and reduce fuel consumption: “We have compared our results with different benchmarks, but perhaps an interesting one is comparing the white phase concept to the same intersection with identical traffic volume and CAV penetration without the white phase,” says Dr Ali Hajbabaie.
“When autonomous vehicles are 10% of the traffic stream, the white phase reduces the travel delay by 3%,” adds Ramin Niroumand, first author of the paper and a PhD student at NC State. “When 50% of traffic is comprised of autonomous vehicles, the white phase reduces travel delay by 10% in our test intersection,” he continues. “For fuel consumption, when the autonomous vehicle market share is 10%, we observed a 1% reduction. With 90% CAVs, we observed a 13% reduction in fuel consumption.”
The white phase was tested using PTV Vissim traffic simulation software. “We have modified its traffic light control logic and used it to simulate the movement of human-driven vehicles while we control CAVs with the optimization models we have developed,” notes Leila Hajibabai, a co-author of the paper, and assistant professor at NC State’s Edward P. Fitts Department of Industrial and Systems Engineering. “We have run many hours of simulation and have used a typical intersection with various traffic volumes and autonomous vehicle penetration rates.”
Real-world testing is also underway: “We are now making runs in our small-scale automated vehicle testbed,” explains Dr Hajbabaie. “The next step will be testing it in a driving simulator to see how drivers will react to the new signal indication and how they follow the vehicle in front. We will modify the approach based on these tests and then do real-world tests using our autonomous vehicles.”
Mobile control paradigm
The granting of some of the traffic flow control to AVs is described as “the mobile control paradigm” by Dr Hajbabaie. “The main idea is to utilize CAV capabilities to control traffic,” he says. “CAVs represent mobile controllers that can collaborate with traffic signal controllers to navigate groups of human-driven vehicles through the intersection. The idea is that when enough CAVs are present, they can communicate with each other and traffic light controllers to negotiate a safe right of way for the group they are leading. Therefore, there is no need to show green, amber or red, only to let drivers know that autonomous vehicles are in charge at that time. The white phase allows that.”
During the white phase, each driver must follow the vehicle in front and not change lanes to pass it. “In transitioning from no automation to full autonomy, we still need to use traffic lights,” says Dr Hajbabaie. “We wanted to use portions of the cycle length, where autonomous vehicles could operate similarly to signal-free conditions, and the white phase makes that happen. And, just to be clear, the color of the ‘white light’ doesn’t matter. What’s important is that there be a signal that is clearly identifiable by drivers.”
“ONE CONSTRUCTIVE COMMENT WE HAVE RECEIVED IS THAT WHITE IS NOT THE BEST CHOICE OF COLOR… THE WHITE PHASE IS JUST A TERM THAT WE USE FOR CONSISTENCY AND SIMPLICITY, BUT WE PREFER A NEW INDICATION RATHER THAN A NEW COLOR”
Leila Hajibabai, assistant professor, Edward P Fitts Department of Industrial and Systems Engineering, NC State University
Distributed optimization
The white paper builds on earlier research first undertaken in 2020. However, that initial concept relied on a centralized computing approach, with the computer controlling the traffic light being responsible for receiving input from all approaching CAVs, making the necessary calculations, and then telling the CAVs exactly how they should proceed through the intersection.
“The latest concept mainly addresses the computational challenges we faced in the original concept,” explains Leila Hajibabai. “In the new paper, we use distributed optimization techniques that allow utilizing the computational power of autonomous vehicles. Such techniques allow us to find trajectories faster.”
Distributed optimization uses the computing resources of all the CAVs to dictate traffic flow, which the authors claim is both more efficient, and less likely to fall prey to communication failures. For example, if there’s an interruption or time lag in communication with the traffic light, the distributed computing approach would still be able to handle traffic flow smoothly.
When could this happen?
The researchers acknowledge that CAVs cannot currently support the new distributed computing approach, while governments have little budget or appetite to install brand new infrastructure at every intersection in the immediate future.
“There are a number of things that need to happen before this concept could become a reality,” admits Dr Hajbabaie. “First, we need reliable autonomous vehicles. Second, we need reliable communication between the vehicles and infrastructure. The third is education and outreach. We need to educate drivers and other roadway users, such as pedestrians, about this new traffic light indication and how we need to react to them. The latter will be the most significant challenge that could be time-consuming.”
However, all the authors insist there are various elements of the white phase concept that could be adopted with only minor modifications to both intersections and existing CAVs, pointing to cargo ports that feature high volumes of commercial vehicle traffic as a potential first use case for the system. “Commercial vehicles seem to have higher rates of autonomous system adoption, so there could be an opportunity to implement a pilot project in that setting that could benefit port traffic and commercial transportation,” says Dr Hajbabaie.

The team has not approached any departments of transportation directly with its work, but insists overall feedback has been largely very positive. “One constructive comment that we have received is about the white color not being the best choice,” notes Leila Hajibabai. “That is true, as we have also explained in our papers that the white phase is just a term that we use for consistency and simplicity, but we would prefer a new indication rather than a new color. We can think of it as programming the existing traffic lights that we currently see at intersections to show an indication for autonomous vehicles based on the concept we are proposing. So rather than adding a signal head, which is costly, we can just reprogram the existing ones.”
Dedicated AV lanes?
Some academics and pilot projects are taking the view that it may just be simpler to have dedicated, clearly defined and separate lanes for autonomous and non-autonomous vehicles. However, NC State academics believe this is not ideal. “Dedicating a lane to autonomous vehicles, especially when we do not have many of them in the traffic stream, will lead to inefficient lane utilization, can increase travel time and reduce capacity,” says Leila Hajibabai. “When we have too many autonomous vehicles, the same issue can occur. Our concept balances the utilization of the intersection and cycle length among autonomous and non-autonomous vehicles.” In conclusion, Dr. Ali Hajbabaie says the main message he wishes to share is that we should accept that autonomous vehicles are coming, and they will significantly change how we travel and manage our traffic systems. “We need to embrace the new technology and prepare for it now,” he says. “If we plan for the new changes properly, we can experience significant improvements in traffic operations and safety in existing bottlenecks, such as signalized intersections, roundabouts, stop-controlled intersections, etc. Good planning for the future, especially in the transition period when we have a mixture of autonomous and human-driven vehicles, would help achieve the benefits quickly.”
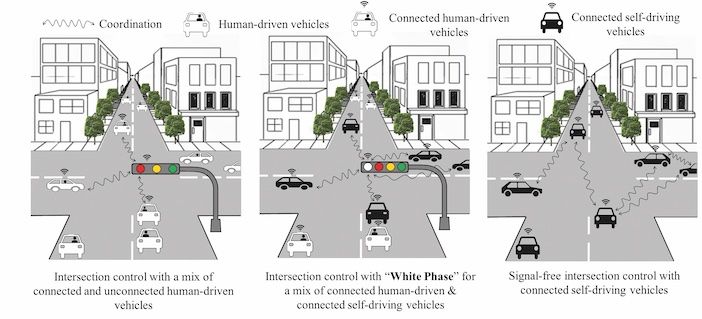
HOW DOES IT WORK?
The white phase concept relies on CAVs communicating wirelessly with both each other and the computer controlling the traffic signal. When enough CAVs are approaching the intersection, this would activate the white light.
The white light is a signal that CAVs are coordinating their movement to facilitate traffic through the intersection more efficiently. Any non-automated vehicles – those being driven by a human – would simply be required to follow the vehicle in front of them: if the car in front of them stops, they stop; if the car in front of them goes through the intersection, they go through the intersection. When too many vehicles approaching the intersection are being controlled by drivers, rather than CAVs, the signal would revert to the conventional green-amber- red pattern.
“The reaction time we are allowing human drivers is identical to normal driving conditions,” says concept developer Dr Ali Hajbabaie of NC State University. “We allow 1.5 to 2.5 seconds of reaction time. No further distance is required as a driver needs to follow the vehicle in front, which is similar to what we usually do in our everyday travels. The only difference is that once a driver gets to the intersection, there will be no green, amber or red lights if the white phase is in effect. If the distance between the human-driven vehicle and the AV becomes too long, the white phase will be terminated and green/ amber/red will be shown to avoid any unsafe situation.”
This feature was originally published in the May edition of TTi magazine


